System Overview
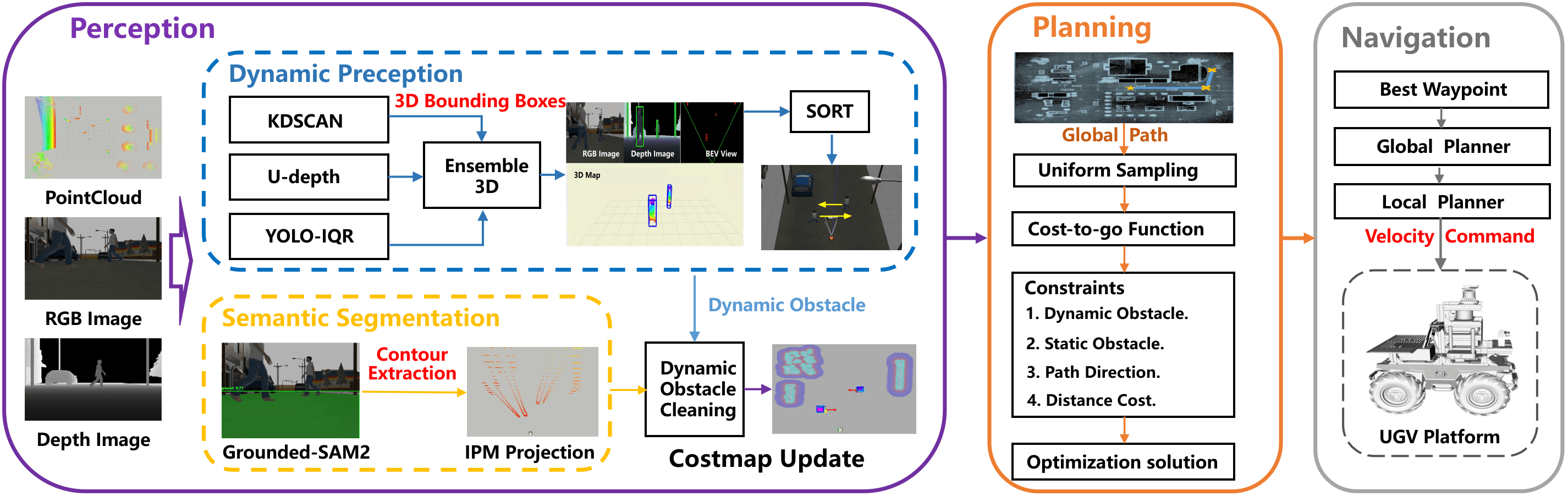
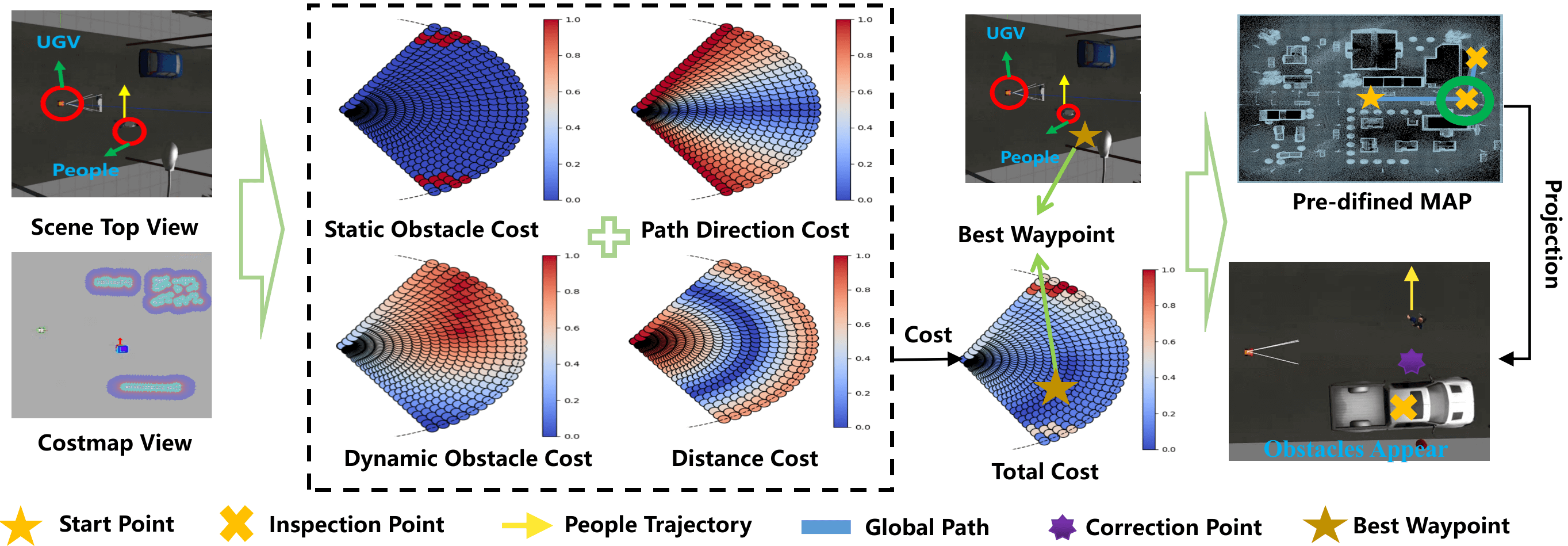
The DLAN system framework integrates perception, planning, and real-time waypoint correction modules to ensure safe and efficient navigation in complex environments. The perception module uses Ensemble3D to fuse RGB and depth camera data for dynamic obstacle detection, with trajectory prediction via the SORT algorithm. Grounded-SAM2 segments passable areas and projects them into 3D space. The planning module optimizes waypoints based on obstacle avoidance and path adherence, which are then executed by the Navigation2 system. Real-time perception data refines waypoints to prevent navigation failures, ensuring adaptive and reliable navigation.